





Yobot
Machine vision kit
Machine vision kit
Không thể tải khả năng nhận hàng tại cửa hàng
Product Name: Machine Vision & Deep Learning Experimental System
Positioning: An open-source, full-stack educational platform combining "Vision + AI + Control," tailored for universities and vocational institutions.
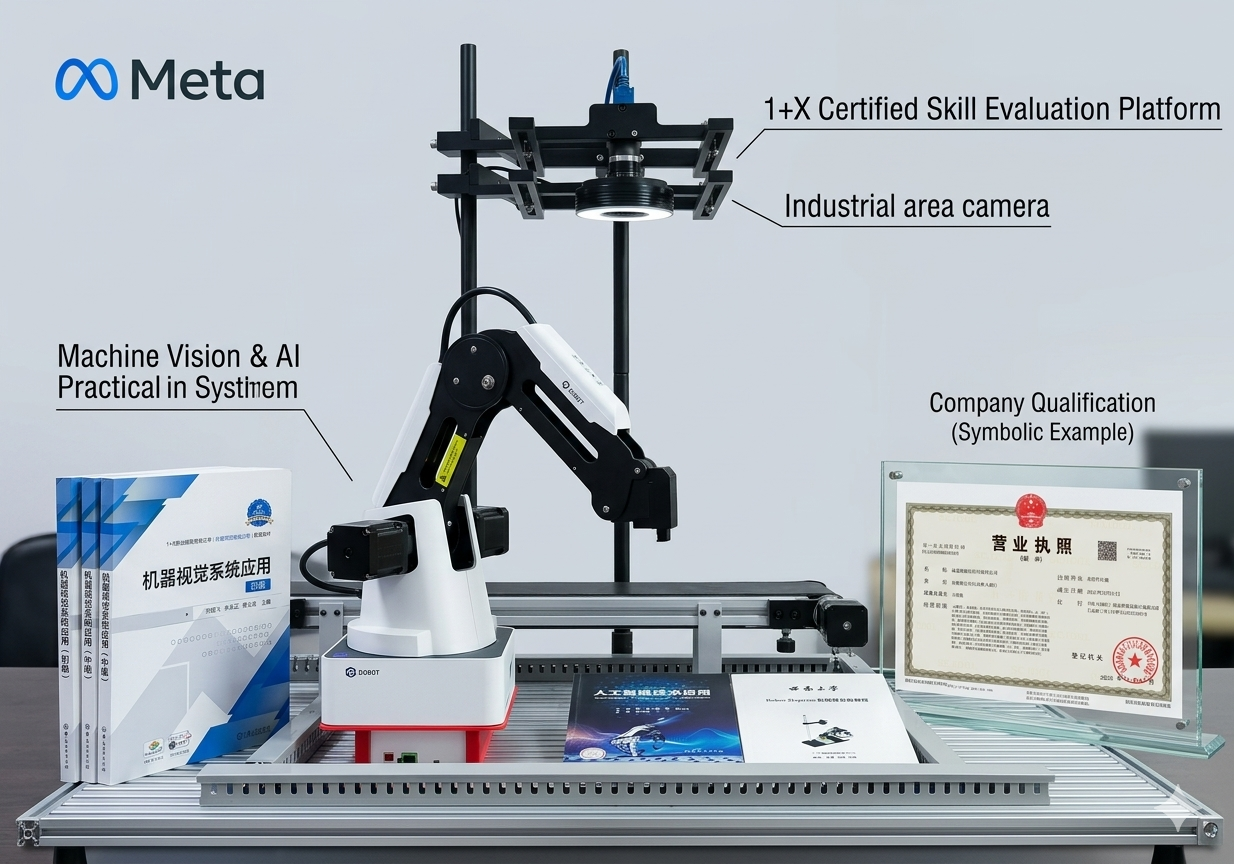
▍ Product Overview: This system is a comprehensive machine vision training platform designed to bridge the gap between software algorithms and physical execution. Moving beyond traditional data-only image processing, it utilizes standard vision hardware like area scan cameras and features 18 built-in classical vision experiments. By integrating a robotic arm and the TensorFlow deep learning framework, learners can use AI algorithms to drive the robotic arm for real-time object grasping and sorting—transforming visual data into physical action.
▍ Core Functions
-
Comprehensive Vision Training: Includes 18 practical experiments covering general image processing, giving users a complete understanding of visual inspection systems.
-
Industrial Hardware Selection: Provides detailed guides on selecting cameras, lenses, and light sources, equipping students with practical industrial engineering skills.
-
Hardware-Software Synergy: Integrates a robotic arm to expand visual application scenarios, moving from simple image processing to physical interaction and sorting.
▍ Key Advantages & Educational Value
-
Fully Open-Source for Secondary Development: Built on the Open-CV platform, the software and application codes are completely open-source, offering maximum flexibility for academic research and custom development.
-
Lowering the AI Threshold: Seamlessly introduces the TensorFlow deep learning framework, making complex AI algorithms accessible to learners.
-
Rapid Learning Curve: Comes with fully integrated experimental textbooks and instructional videos, ensuring users can quickly master the system and expand their engineering mindset.
Chia sẻ



Video
Specification parameters
1) Base/Chassis Parameters:
Motor reduction ratio: ≥1:2; Load capacity: ≥12kg; Maximum speed: ≥2.7 m/s; Body weight: ≥6 kg; Dimensions: ≥400mm*500mm; Suspension system: ≥coaxial swing suspension; Off-road wheels: ≥8 inches; Battery capacity: ≥5000mAh; Battery life: ≥6.5 hours (idle) and ≥5.5 hours (3kg load); Motor: DC Brushed Motor; Encoder: AB-phase high-precision encoder; Features: App control supports navigation, map creation, image transmission, obstacle avoidance, and other functions; Support: Supports controllers, with reserved Usart/CAN communication control interfaces and multiple IO interfaces; Operating System: The STM32 board runs on freeRTOS ROS with Ubuntu 18.04 and Melodic
2) Host computer processing unit:
GPU: 384-core NVIDIA Volta ™ GPU with 48 Tensor Cores; CPU: A 6-core NVIDIA Carmel ARM® v8.2 64-bit processor with 6MB L2 and 4MB L3 cache; Visual Accelerator: 7-Channel VLIW Visual Processor; Deep Learning Accelerator: 2 NVDLA Engines; Video memory: 8GB; Video encoding: 2x 4K60|4x 4K30|10x 1080p60|22x 1080p30 (H.265); Video decoding: 2x 8K30|6x 4K60|12x 4K30|22x 1080p60|44x 1080p30 (H.265); Cameras: 2 MIPI CSI-2 D-PHY channels; Connectivity: Gigabit Ethernet, WiFi; Display: HDMI and DP; USB: 4xUSB3.1, USB2.0 Micro-B; I/O: GPIO, I2C, I2S, SPI, UART
3) Lower-level machine processing unit:
CPU: Based on STM32; Core width: ≥32 bits; Maximum clock frequency: ≥72MHz; Communication modes: Supports CAN, I2C, IrDA, LIN, SPI, UART/USART, and USB; Peripheral devices: DMA, motor control PWM, PDR, POR, PVD, PWM, temperature sensor, WDT, crystal oscillator; Input/output count: ≥51; Program memory capacity: ≥256KB; Program memory type: FLASH; RAM capacity: ≥48K; Voltage-Source (Vcc/Vdd): 2 V to 3.6 V; Oscillator type: internal
4) Laser navigation scanning unit:
Range: 0.15-12m; Scan angle: 0-360°; Range resolution: <0.5mm; Angle resolution: ≤1°; Single measurement time: ≤0.5ms; Measurement frequency: ≥4000 Hz; Scan frequency: 1-10 Hz